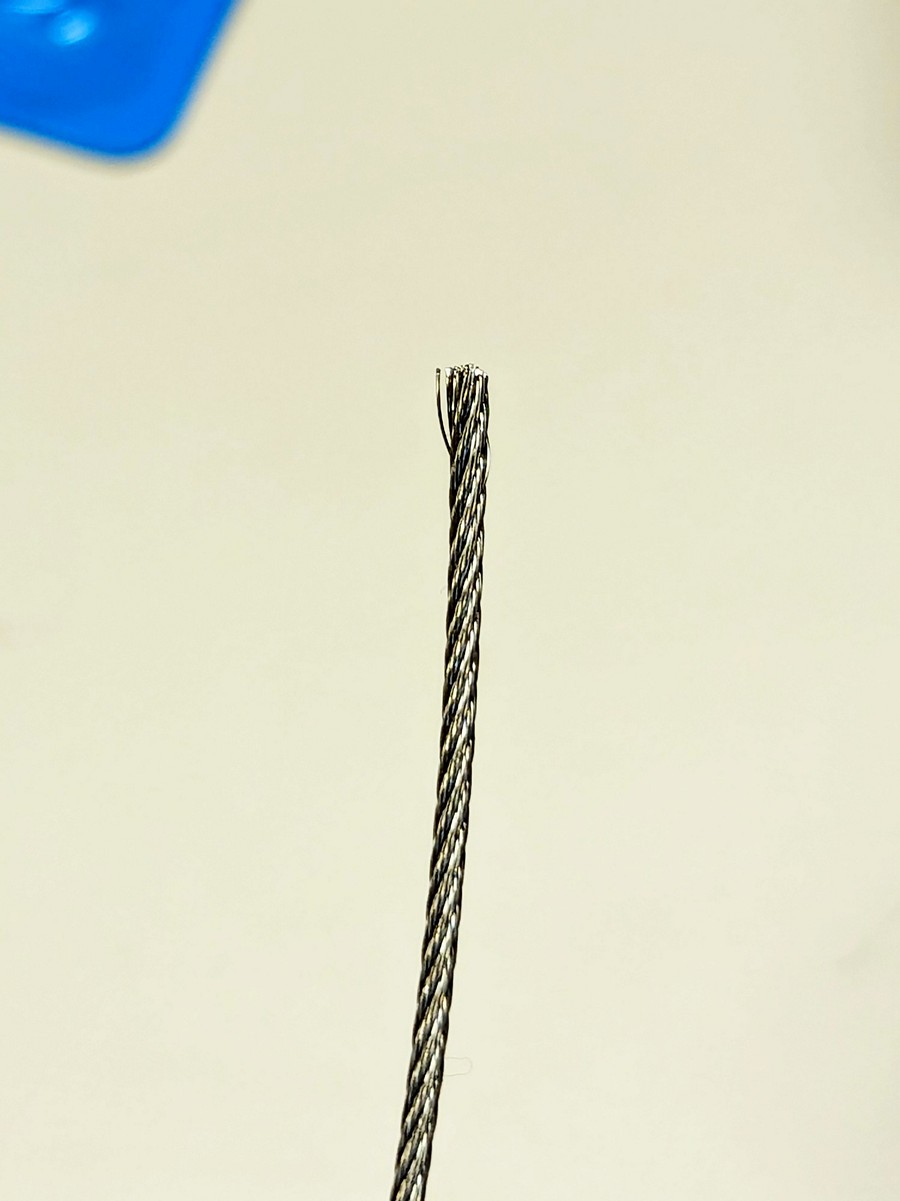
I have some 1.5mm diameter stainless 7x7 wire rope that I want to terminate by melting the ends so it will not unwind or stab. The regulators are bad on my oxyacetylene rig or I would try that. How would I go about using a MIG or TIG welder in the space to do the same?
They do sell aluminum/pewter termination tabs that you can crimp. Dip in JB weld or epoxy and let dry.
It kind of needs to be the same width so the cable can be threaded through stuff. And the ends are real stabby. It’s seven bundles of seven wires each.
I guess I could just spot TIG the end of the cable to nothing. The job would take three seconds. Setup would take 15 minutes.
Is hot glue a bad idea? Or a shoe lace aglet? Or heat shrink?
1 Like
All good ideas : ) It needs to maintain a slim profile. I did not consider heat shrink tubing. Think I’ll try heat shrink over a small bit of epoxy. FYI, I’m building an X/Y table using a cable system instead of timing belts. I’m going for speed over accuracy.
1 Like
You could possibly even try solder. Should flow just fine over stainless with flux.
I did not realize you can solder stainless steel.
?
How would a cable system actuate faster than belts?
I should have said ‘faster than a timing belt on a NEMA 17 stepper motor.’ I’ve got a 180W 3000rpm servo motor to spool the cable. The travel on each axis will equate to relatively few revolutions of the servo.
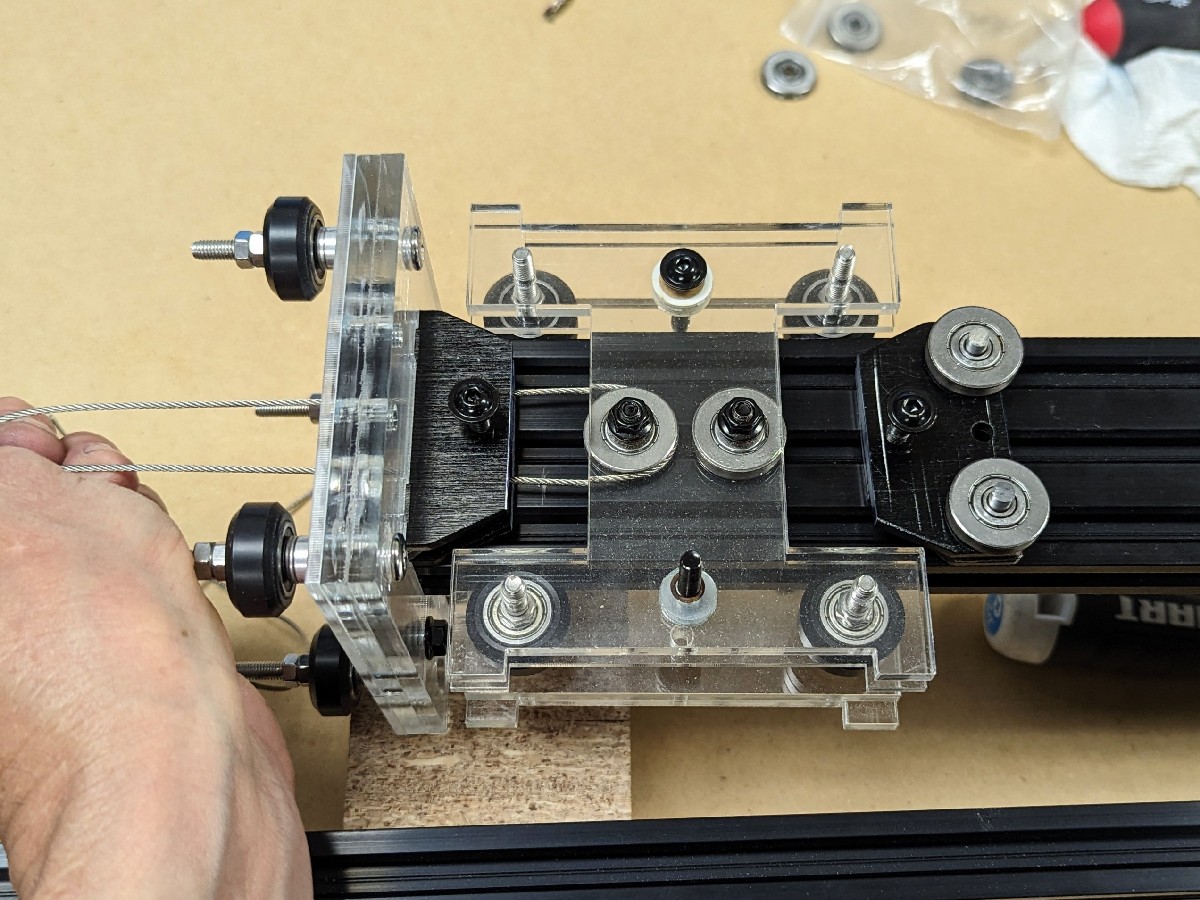
This is the X axis rail and carriage assembly. The pulleys on the right help to visualize the ones hidden from view on the left that redirect the cable 90 degrees. The wheels on the left ride on the Y axis rail. It may end up being scary fast which is what I’m hoping.
1 Like
Belt will be capable of much higher speed than steel cable
How is that? It seems like a cable would be less resistance to movement. Meaning less energy lost and more energy available for movement.
Cable is much less flexible around small pillows and has hysteresis loss, as well as more inertia. It can also wear out from being forced back and forth over a tight radius. And it’s harder to terminate with high tension. And since it’s not a toothed system then there’s additional complexity and reliability issues of doing the drive as a multiple turn capstan.
In most cases where a toothless drive is used, you’d see uhmw-pe (Spectra) rope used. It’s lighter, stronger, flexes better, and terminates easier and more reliably. Many diameters available cheap on Amazon
How much load is this? 2GT is available in up to 15mm width and it’s 86N per mm breaking strength. So even 10mm is almost 200 lbs. Routing around a pulley at 90 deg would be a 282lb load on the pulley shaft, so belt strength probably isn’t going to be the limiting factor. A direct drive nema 17 ac servo with the smallest pulley available is well under 10kgf of peak drive force. Pretensioning does add force but it’s not going to anywhere near the breaking strength of 2gt
FYI the “good stuff” in 2gt is LL-RF. It’s brown on one face, the brown surface is nonslip and very wear resistant. There is also steel belted 2gt but it has higher rolling resistance and wears out much faster going over a small radius pulley, I wouldn’t recommend that
After the six corner pulleys 20mm in diameter were mounted I threaded a 1.5mm wire cable and tested it’s travel with a sawing motion. It seemed as though the cable was not moving as freely as I thought it should. But nothing was rubbing and I was using ball bearing mounts. Then I thought about the cable being stiff like a spring which requires energy to bend when traveling around a corner. And a lot of this energy is not recovered, i.e. the hysteresis loss you mention.
The short answer is - use a fiber instead. Ultra-high molecular weight polyethylene. (UHMWPE) may be the world’s strongest fiber. In a braided cord it offers many advantages in this application and also solves several of my other problems. Thanks for the input. Waiting on amazon.
1 Like